Hi,
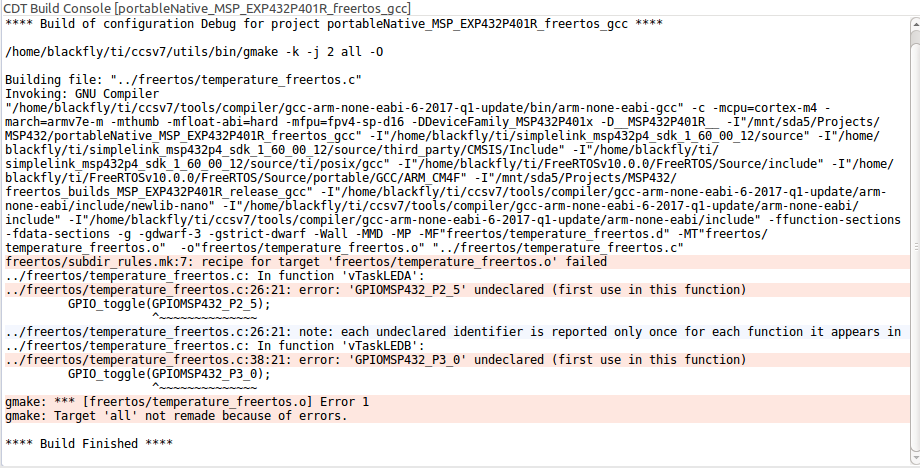
I am new to RTOS. I edited the portableNative_MSP_EXP432P401R_freertos_gcc program in the examples according to my needs. I have written two task to blink two LED using gpio pin P2.5 and pin P3.0 in MSP432. But its very hard for me to configure the gpio. Every time I debug my it gives me the following errors,
I dont know whats wrong with my code. Here is my code,
#include <stdint.h>
#include <unistd.h>
/* RTOS header files */
#include <FreeRTOS.h>
#include <semphr.h>
#include <task.h>
#include <timers.h>
/* Driver Header files */
#include <ti/drivers/GPIO.h>
#include <ti/drivers/I2C.h>
/* Example/Board Header files */
#include "Board.h"
void vTaskLEDA(void *p)
{
uint32_t time = 1;
/* Configure the LED pin */
GPIO_init();
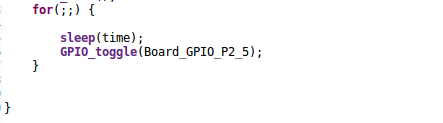
for( ;; ) {
sleep(time);
GPIO_toggle(GPIOMSP432_P2_5);
}
}
void vTaskLEDB(void *p)
{
uint32_t time = 5;
for(;;) {
sleep(time);
GPIO_toggle(GPIOMSP432_P3_0);
}
}
The function vTaskLEDA and vTaskLEDB are being called in main.c file using the extern keyword. Do I need to add any header file for it to work? It has been weeks, and still, I can’t figure out the problem. I need some help guys.
Thanks in Advance.
Hi,
Could you confirm GPIOMSP432_P2_5 and GPIOMSP432_P3_0 are defined in any of the header file mentioned in your program ? I think you need to show whats in the main.c file. Update this topic with the contents in the main.c file.
Regards.
Hello,
I thought it would be defined in the gpio.h header file, but its not. I googled for solution, but the tutorials are confusing for me.
Contents in main.c is given below:
#include <stdint.h>
#include <unistd.h>
/* RTOS header files */
#include <FreeRTOS.h>
#include <task.h>
/* Driver header files */
#include <ti/drivers/GPIO.h>
/* Example/Board Header files */
#include "Board.h"
extern void vTaskLEDA(void *p);
extern void vTaskLEDB(void *p);
/* Stack size in 16-bit words */
#define THREADSTACKSIZE 768 / sizeof(portSTACK_TYPE)
/*
* ======== main ========
*/
int main(void)
{
Board_initGeneral();
xTaskCreate((TaskFunction_t)vTaskLEDA, "LEDA", configMINIMAL_STACK_SIZE, NULL, 2, NULL);
xTaskCreate((TaskFunction_t)vTaskLEDB, "LEDB", configMINIMAL_STACK_SIZE, NULL, 2, NULL);
GPIO_init();
vTaskStartScheduler();
return (0);
}
//*****************************************************************************
//
//! \brief Application defined malloc failed hook
//!
//! \param none
//!
//! \return none
//!
//*****************************************************************************
void vApplicationMallocFailedHook()
{
/* Handle Memory Allocation Errors */
while(1)
{
}
}
//*****************************************************************************
//
//! \brief Application defined stack overflow hook
//!
//! \param none
//!
//! \return none
//!
//*****************************************************************************
void vApplicationStackOverflowHook(TaskHandle_t pxTask, char *pcTaskName)
{
//Handle FreeRTOS Stack Overflow
while(1)
{
}
}
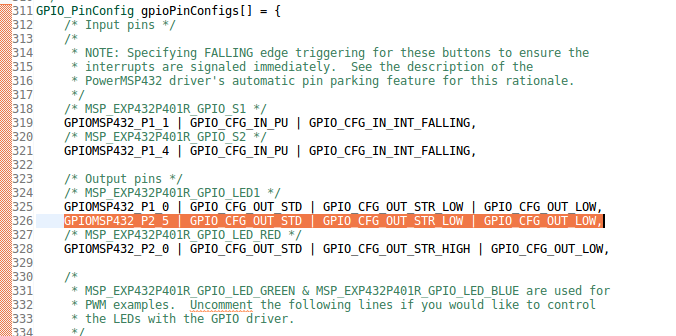
In order to configure gpio pins, you need to edit MSP_EXP432P401R.c, MSP_EXP432P401R.h, Board.h files in the project folder. For example, if you want to make work pin P2_5 of msp432, then go to MSP_EXP432P401R.c and add
GPIOMSP432_P2_5 | GPIO_CFG_OUT_STD | GPIO_CFG_OUT_STR_LOW | GPIO_CFG_OUT_LOW,
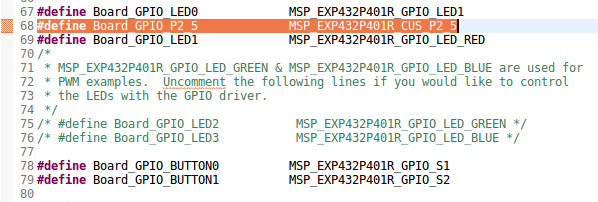
in GPIO_PinConfig gpioPinConfigs array. After that go to MSP_EXP432P401R.h and add a name MSP_EXP432P401R_CUS_P2_5 ( you may choose whatever name you want ) in MSP_EXP432P401R_GPIOName enum declaration. Note that the order of the pin configurations must coincide with what was defined in MSP_EXP432P401R.h. Finally go to Board.h and add
#define board_GPIO_P2_5 MSP_EXP432P401R_CUS_P2_5
You may choose any name instead of board_GPIO_P2_5. Now everything is done and you may use Board_GPIO_P2_5 to tweak pin P2_5 of MSP432.

Regards!!